Análisis Dinámico de Sistemas (Teleco)
Área de Ingeniería de Sistemas y Automática
Escuela Politécnica Superior de Ingeniería Gijón
Universidad de Oviedo
Resumen
El objetivo de la práctica es modelar el comportamiento dinámico
de un péndulo, determinando a partir de las ecuaciones físicas un
modelo no lineal que lo describe con precisión en todos sus
puntos. Asimismo, se obtendrán mediante el procedimiento de
linealización por Taylor, dos modelos lineales que lo aproximan en
torno a sendos puntos de equilibrio. Tanto el modelo no lineal
como los dos modelos linealizados se simularán mediante Simulink
en distintos escenarios, comprobando la validez de las
aproximaciones. Asimismo, se realizará una animación del péndulo
que permitirá corroborar visualmente el sentido físico de los
modelos obtenidos.
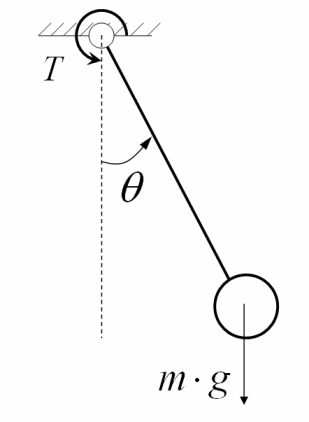
El sistema se compone de una bola de masa m situada en el
extremo de una barra de masa despreciable con una longitud l.
Además, se sabe que el momento de inercia del péndulo respecto a
su punto de giro es J, el coeficiente de fricción viscosa es B
y el par aplicado es T. El ángulo girado q, que será la
variable de salida y, se toma según indica la figura 1.
El ángulo q queda determinado por la ecuación (1).
El par T aplicado sobre el péndulo se invierte en incrementar la
aceleración angular, en vencer la fricción viscosa y en compensar
el par generado por el peso del sistema.
T
=
J ·
d2 q(t)
dt2
+ B ·
dq(t)
dt
+ m ·g ·l ·sen q(t)
(1)
Esta ecuación diferencial no lineal de segundo orden describe el
comportamiento dinámico del péndulo.
Una representación alternativa a la ecuación diferencial
(1) es la representación interna o de espacio de estados.
En muchos sistemas físicos una elección adecuada consiste en tomar
como variables de estado la salida y sus derivadas. En este caso
tomaremos el ángulo girado q y la velocidad angular, según:
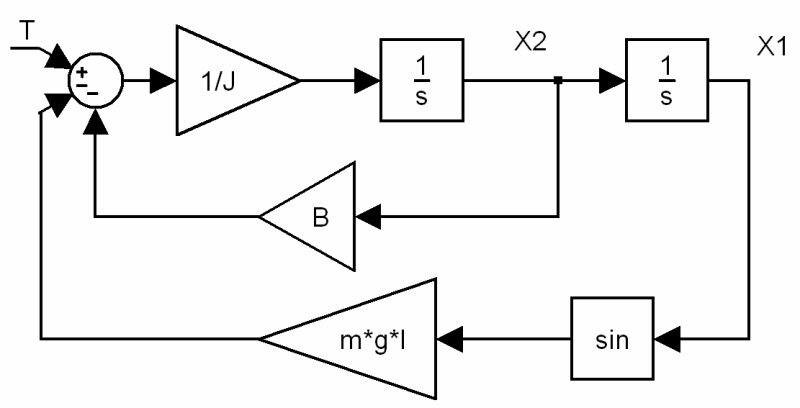
A partir de las ecuaciones anteriores se puede obtener fácilmente
el diagrama de bloques de la figura 2 que define la
variable de salida q ante una entrada de par T.
Los valores de las constantes que definen al sistema son:
l = 1; % longitud en metros
B = 2; % coef. de fricción viscosa en N.m / (rads/s)
g = 9.8; % aceleración de la gravedad m.s^2
m = 3; % masa en kg
J = m*l^2; % momento de inercia en kg.m^2
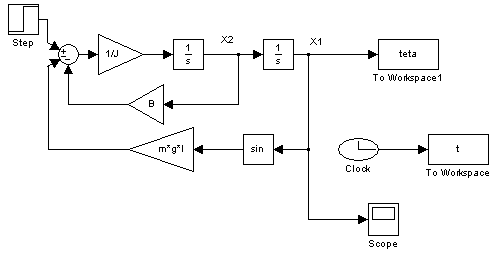
Para proceder a la simulación del péndulo se usa la herramienta Simulink de MATLAB. La implementación tiene el aspecto mostrado en la figura 3. Hay que tener en cuenta que las condiciones iniciales quedan determinadas por las valores iniciales de los integradores. Asimismo, la presencia de integradores simplifica la obtención de las derivadas y la elección de las variables de estado.
Figure 3: Simulación del péndulo usando Simulink
Además, se puede simular de una forma más visual la evolución del péndulo ejecutando el siguiente script.
figure(1); for k=1:length(t.signals.values);
plot([0,l*exp(j*(teta.signals.values(k)-(pi/2)))],'o-');
axis equal;
axis(1.2*[-1 1 -1 1]);
grid on;
drawnow;
end
Obsérvese que se ha introducido el elemento clock en el
esquema de Simulink para generar el vector de tiempos
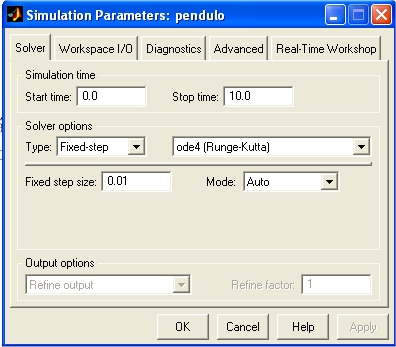
almacenándolo en el workspace. Además, para una correcta
animación mediante ejecución del código anterior es necesario
ajustar los parámetros de simulación a un periodo fijo de cálculo
eligiendo como algoritmo ode4 (que permite definir un paso
de simulación constante) tal cómo se indica en la figura
4.
Determinar mediante Simulink la evolución del sistema cuando
se introduce durante 2 segundos un par de T=10 Nm2.
Obtener una representación gráfica de la evolución a lo largo del
tiempo del ángulo girado q.
Simular la evolución del péndulo cuando se deja en
movimiento libre (T=0), partiendo las condiciones iniciales:
q(0)
=
p/2
×
q
(0)
=
5 rad/s
Realizar animación gráfica del péndulo mediante un script de
MATLAB similar al descrito en el enunciado.
Variar los parámetros m, l, g y B. Obsérvese su
influencia en la frecuencia de oscilación y en la respuesta
q.
Obtener mediante el procedimiento de linealización por
Taylor, modelos lineales en torno a los puntos de equilibrio
definidos por q(0)=0 y q(0)=p/2 e introducirlos en
Simulink como funciones de transferencia. Comparar la simulación
de los modelos linealizados con la del modelo original para zonas
de trabajo próximas y para zonas alejadas de los respectivos
puntos de equilibrio.
File translated from
TEX
by
TTH,
version 3.76. On 14 Nov 2006, 13:33.