Ejercicio del martes 4 de Marzo de 2008 (Linealización)
De ISAwiki
(Diferencia entre revisiones)
m |
|||
| Línea 1: | Línea 1: | ||
1- Linealizar el sistema dado por las ecuaciones (1) y (2) y sacar la función de transferencia <math>\frac{\theta(s)}{T(s)}</math>. | 1- Linealizar el sistema dado por las ecuaciones (1) y (2) y sacar la función de transferencia <math>\frac{\theta(s)}{T(s)}</math>. | ||
| − | <math>T(t) = J\frac{d\theta(t)}{dt} + B \omega^2(t)</math> (1) | + | <math>T(t) = J\frac{d^2\theta(t)}{dt^2} + B \omega^2(t)</math> (1) |
<math>\omega(t) = \frac{d\theta(t)}{dt}</math> (2) | <math>\omega(t) = \frac{d\theta(t)}{dt}</math> (2) | ||
| Línea 12: | Línea 12: | ||
Linealizamos la primera ecuación: | Linealizamos la primera ecuación: | ||
| − | <math>\Delta T(t) = J\frac{d\Delta\theta(t)}{dt} + 2 B \omega_0 \Delta\omega(t)</math> (1') | + | <math>\Delta T(t) = J\frac{d^2\Delta\theta(t)}{dt^2} + 2 B \omega_0 \Delta\omega(t)</math> (1') |
La segunda ecuación ya es lineal: | La segunda ecuación ya es lineal: | ||
| Línea 20: | Línea 20: | ||
Pasando ambas ecuaciones a transformadas de Laplace: | Pasando ambas ecuaciones a transformadas de Laplace: | ||
| − | <math> T(s) = J s \theta(s) + 2 B \omega_0 \omega(s)</math> (3) | + | <math> T(s) = J s^2 \theta(s) + 2 B \omega_0 \omega(s)</math> (3) |
<math>\omega(s) = s \theta(s)</math> (4) | <math>\omega(s) = s \theta(s)</math> (4) | ||
Última revisión de 13:46 16 mar 2009
1- Linealizar el sistema dado por las ecuaciones (1) y (2) y sacar la función de transferencia  .
.
 (1)
(1)
 (2)
(2)
donde J = 1, B = 1 y el punto de equilibrio viene dado por ω0 = {última cifra del DNI}.
Solución:
Linealizamos la primera ecuación:
 (1')
(1')
La segunda ecuación ya es lineal:
 (2')
(2')
Pasando ambas ecuaciones a transformadas de Laplace:
T(s) = Js2θ(s) + 2Bω0ω(s) (3)
ω(s) = sθ(s) (4)
A partir de (3):
 (5)
(5)
A partir de (4):
 (6)
(6)
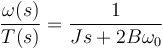
Combinando (5) y (6):
 (7)
(7)
Por ejemplo, para un DNI finalizado en 4, la solución sería:
 (8)
(8)
2- Linealizar la ecuación (1) en el punto de equilibrio dado por x0 = π / 2:
 (1)
(1)
Solución:
 (1')
(1')
Como sen(x0) = 1:
 (2)
(2)