Sintonización del regulador proporcional por métodos clásicos (SA): ejercicios propuestos
De ISAwiki
(Diferencia entre revisiones)
| Línea 12: | Línea 12: | ||
* Indique cuál es el valor máximo que alcanzaría la salida ante una perturbación tipo escalón unitario con el regulador diseñado en el apartado anterior. | * Indique cuál es el valor máximo que alcanzaría la salida ante una perturbación tipo escalón unitario con el regulador diseñado en el apartado anterior. | ||
* Obtenga ahora un regulador que disminuya el error en régimen permanente ante una perturbación de tipo escalón unitario a un valor por debajo de 0.016, manteniendo un margen de fase superior a 60º. | * Obtenga ahora un regulador que disminuya el error en régimen permanente ante una perturbación de tipo escalón unitario a un valor por debajo de 0.016, manteniendo un margen de fase superior a 60º. | ||
| + | |||
| + | Nota: se recomienda validar los resultados obtenidos a mano con MATLAB. Para ello puede acudirse a los laboratorios de PC en [http://isa.uniovi.es/laboratorios/ horarios libres], o bien aprovechar tiempo sobrante de prácticas. | ||
Revisión de 18:17 30 mar 2009
Se recomienda hacer alguno de los siguientes problemas de (Franklin, et. al., 2006):
- Secciones 5.1, 5.2, 5.3 (repaso)
- Sección 5.4
- Problema 6.42
- Problema 6.59(a)(b)
Se pretende controlar un sistema de planta 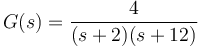 utilizando un regulador proporcional:
utilizando un regulador proporcional:
- Determine la ganancia necesaria para que el sistema tenga la máxima velocidad de respuesta (tiempo de establecimiento más pequeño) sin sobreoscilación.
- En la práctica, si los polos complejos conjugados forman un ángulo
 (según convenio del Franklin), o dicho de otra forma, un coeficiente de amortiguamiento
(según convenio del Franklin), o dicho de otra forma, un coeficiente de amortiguamiento  , su sobreoscilación es muy pequeña (< 1%) y disminuye en gran medida su tiempo de respuesta. Calcular el regulador proporcional que deja al sistema en esta situación.
, su sobreoscilación es muy pequeña (< 1%) y disminuye en gran medida su tiempo de respuesta. Calcular el regulador proporcional que deja al sistema en esta situación.
- Calcule el regulador que hace que el error provocado por una perturbación de tipo escalón unitario se mantenga en un valor inferior o igual a 0.05.
- Indique cuál es el valor máximo que alcanzaría la salida ante una perturbación tipo escalón unitario con el regulador diseñado en el apartado anterior.
- Obtenga ahora un regulador que disminuya el error en régimen permanente ante una perturbación de tipo escalón unitario a un valor por debajo de 0.016, manteniendo un margen de fase superior a 60º.
Nota: se recomienda validar los resultados obtenidos a mano con MATLAB. Para ello puede acudirse a los laboratorios de PC en horarios libres, o bien aprovechar tiempo sobrante de prácticas.